DisparityMap< T > Class Template Reference
Child class of BpImage to define disparity map image that is output from bp processing. More...
#include <DisparityMap.h>
Inheritance diagram for DisparityMap< T >:
Collaboration diagram for DisparityMap< T >:
Public Member Functions | |
| DisparityMap () | |
| DisparityMap (const std::array< unsigned int, 2 > &width_height) | |
| DisparityMap (const std::array< unsigned int, 2 > &width_height, const T *input_disparity_map_vals, unsigned int disparity_map_vals_scale=1) | |
| DisparityMap (const std::string &file_path_disparity_map, unsigned int disparity_map_vals_scale=1) | |
| DisparityMapEvaluation | OutputComparison (const DisparityMap &disparity_map_to_compare, const beliefprop::DisparityMapEvaluationParams &evaluation_parameters) const |
| void | SaveDisparityMap (const std::string &disparity_map_file_path, unsigned int scale_factor=1) const |
 Public Member Functions inherited from BpImage< T > Public Member Functions inherited from BpImage< T > | |
| BpImage () | |
| BpImage (const std::array< unsigned int, 2 > &width_height) | |
| BpImage (const std::array< unsigned int, 2 > &width_height, const T *input_pixel_vals) | |
| BpImage (const std::string &file_name) | |
| const std::unique_ptr< T[]> & | UniquePtrToPixelData () const |
| T * | PointerToPixelsStart () const |
| T | PixelAtPoint (const std::array< unsigned int, 2 > &point_xy) const |
| T | PixelAtPoint (unsigned int i) const |
| void | SetPixelAtPoint (const std::array< unsigned int, 2 > &point_xy, T val) |
| void | SetPixelAtPoint (unsigned int i, T val) |
| unsigned int | Width () const |
| unsigned int | Height () const |
| void | SaveImageAsPgm (const std::string &filename) const |
Additional Inherited Members | |
| Protected Member Functions inherited from BpImage< T > | |
| void | LoadImageAsGrayScale (const std::string &file_path_image) |
| void | pnm_read (std::ifstream &file, std::string &buf) const |
| BpImage< unsigned char > | ImageRead (const std::string &file_name, beliefprop::ImageType image_type, bool weighted_rgb_conversion=true) const |
| unsigned int | TotalPixels () const |
| Protected Attributes inherited from BpImage< T > | |
| std::array< unsigned int, 2 > | width_height_ |
| std::unique_ptr< T[]> | pixels_ |
Detailed Description
template<class T>
class DisparityMap< T >
Child class of BpImage to define disparity map image that is output from bp processing.
- Template Parameters
-
T
Definition at line 45 of file DisparityMap.h.
Constructor & Destructor Documentation
◆ DisparityMap() [1/4]
template<class T >
|
inline |
Definition at line 47 of file DisparityMap.h.
◆ DisparityMap() [2/4]
template<class T >
|
inlineexplicit |
Definition at line 49 of file DisparityMap.h.
◆ DisparityMap() [3/4]
template<class T >
|
inlineexplicit |

◆ DisparityMap() [4/4]
template<class T >
|
inlineexplicit |
Definition at line 68 of file DisparityMap.h.
Member Function Documentation
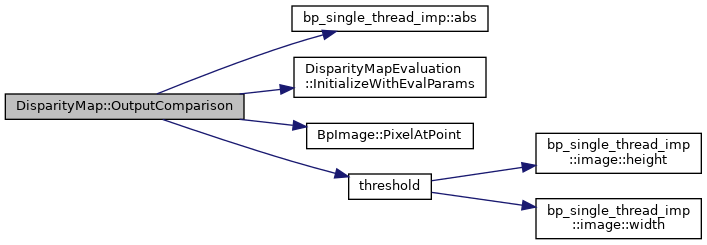
◆ OutputComparison()
template<class T >
| requires std::is_arithmetic_v< T > DisparityMapEvaluation DisparityMap< T >::OutputComparison | ( | const DisparityMap< T > & | disparity_map_to_compare, |
| const beliefprop::DisparityMapEvaluationParams & | evaluation_parameters | ||
| ) | const |
◆ SaveDisparityMap()
template<class T >
| requires std::is_arithmetic_v< T > void DisparityMap< T >::SaveDisparityMap | ( | const std::string & | disparity_map_file_path, |
| unsigned int | scale_factor = 1 |
||
| ) | const |

The documentation for this class was generated from the following files:
- src/beliefprop/BpImageProcessing/DisparityMap.h
- src/beliefprop/BpImageProcessing/DisparityMap.cpp