DisparityMapEvaluation.h File Reference
Declares class to store disparity map evaluation results. More...
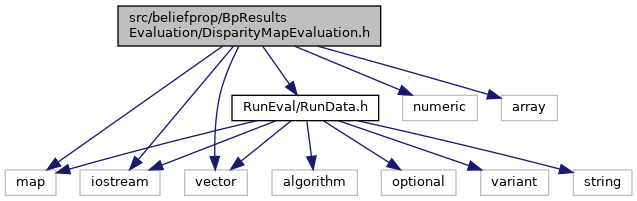
#include <map>#include <iostream>#include <numeric>#include <array>#include <vector>#include "RunEval/RunData.h"
Include dependency graph for DisparityMapEvaluation.h:
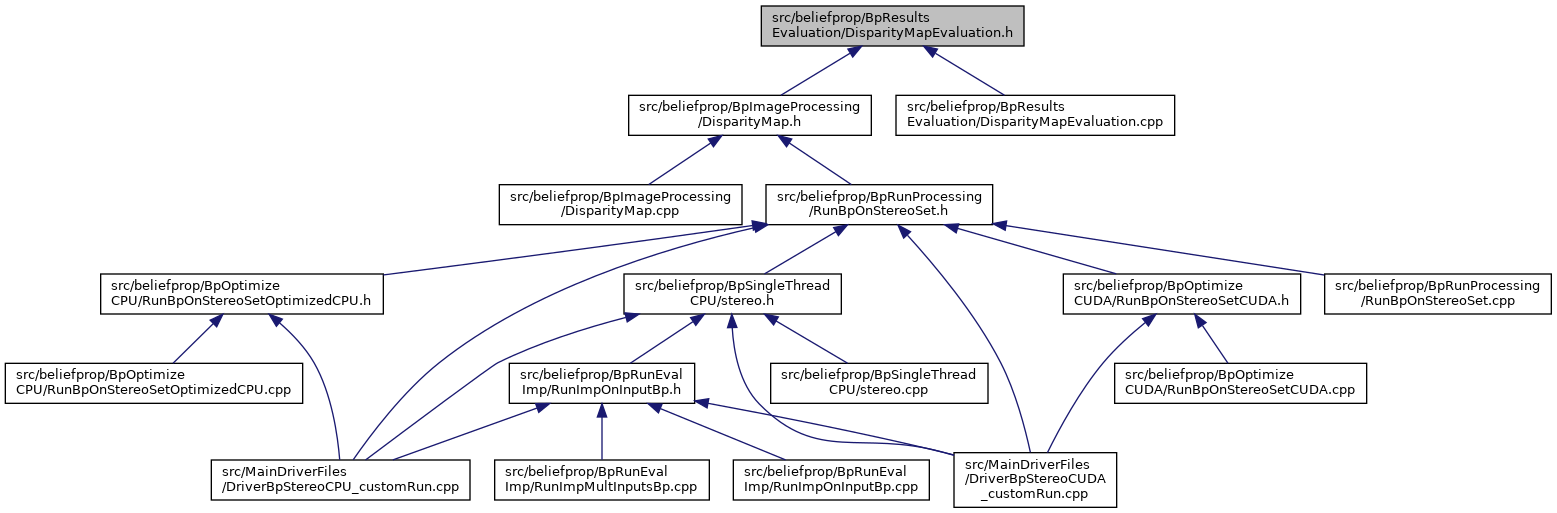
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | beliefprop::DisparityMapEvaluationParams |
| Struct to store parameters for evaluation of disparity map from stereo processing. More... | |
| class | DisparityMapEvaluation |
| Class to store disparity map evaluation results. Specifically comparison between two disparity maps such as output disparity map from bp processing and ground truth disparity map. More... | |
Namespaces | |
| beliefprop | |
| Namespace for enums, constants, structures, and functions specific to belief propagation processing. | |
Variables | |
| constexpr std::string_view | beliefprop::kAvgRMSErrorHeader {"Average RMS error"} |
| Constant string view for header of average RMS error in evaluation. More... | |
| constexpr std::array< float, 4 > | beliefprop::kDisparityDiffThresholds |
| Difference thresholds in output disparity for a computed disparity at a pixel to be considered a "bad pixel" when compared to the ground truth in the evaluation. More... | |
| constexpr float | beliefprop::kMaxDiffCap |
| Max difference in disparity for evaluation where disparity difference for each pixel is capped to minimize influence of outliers in the average difference across all pixels. More... | |
Detailed Description
Declares class to store disparity map evaluation results.
- Copyright
- Copyright (c) 2024
Definition in file DisparityMapEvaluation.h.